Autonomous Heavy Equipment
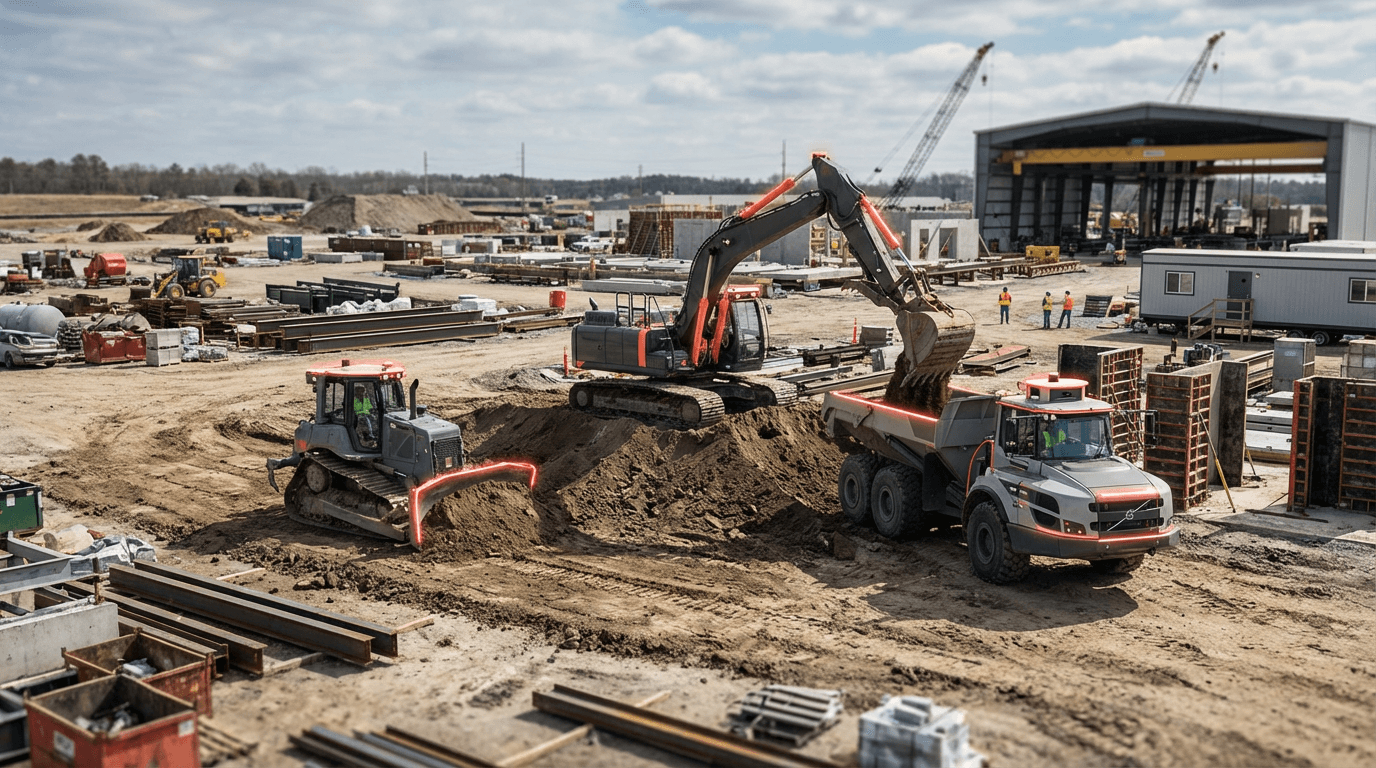
The construction industry has long grappled with challenges that autonomous heavy equipment is uniquely positioned to address: labor shortages in skilled equipment operators, safety risks inherent in operating massive machinery, and the inefficiencies of manual grading and excavation processes. Autonomous heavy equipment encompasses self-driving excavators, bulldozers, haul trucks, and graders that navigate construction sites without direct human control. These machines rely on a sophisticated autonomy stack that integrates multiple sensing and positioning technologies. Real-Time Kinematic Global Navigation Satellite Systems (RTK GNSS) provide centimeter-level positioning accuracy, enabling precise path following and grade control. LiDAR sensors, radar arrays, and camera systems create detailed three-dimensional maps of the work environment, detecting obstacles, terrain changes, and other equipment in real time. Geofencing technology establishes virtual boundaries that confine autonomous operations to designated work zones, preventing machines from entering areas where workers are present or where operations are not authorized. The integration of these technologies allows heavy equipment to execute complex earthmoving patterns, maintain precise grade specifications, and adapt to changing site conditions with minimal human intervention.
The deployment of autonomous heavy equipment addresses several critical industry pain points simultaneously. Construction sites are inherently dangerous environments, and heavy equipment operation accounts for a significant portion of workplace injuries and fatalities. By removing operators from hazardous zones or eliminating the need for human presence in the cab entirely, these systems substantially reduce exposure to risks such as rollovers, collisions, and visibility-related accidents. The technology also tackles the persistent shortage of skilled equipment operators, a challenge that has intensified as experienced operators retire and fewer workers enter the trades. Autonomous systems can operate continuously across multiple shifts without fatigue, dramatically improving productivity on large-scale earthmoving projects such as mining operations, highway construction, and site preparation for major developments. Furthermore, the precision enabled by RTK GNSS and advanced control algorithms reduces material waste and rework, as autonomous machines can maintain grade tolerances that would be difficult for even experienced human operators to achieve consistently. This precision translates directly into cost savings through reduced material consumption and fewer correction cycles.
Early commercial deployments of autonomous heavy equipment have focused on highly structured, repetitive tasks where the technology can demonstrate clear value. Mining operations have emerged as a leading application area, with autonomous haul trucks transporting ore and overburden along predetermined routes in open-pit mines. These deployments have demonstrated substantial improvements in operational efficiency and safety metrics, with some operations reporting productivity gains while simultaneously reducing fuel consumption through optimized routing and speed control. In traditional construction contexts, autonomous dozers and graders are being deployed for large-scale site preparation and road construction projects, where the work involves repetitive grading patterns over extended areas. Research initiatives and pilot programs are expanding the capabilities of these systems to handle more complex scenarios, including dynamic obstacle avoidance in congested work zones and coordination between multiple autonomous machines operating simultaneously. As the technology matures and regulatory frameworks evolve to accommodate autonomous construction equipment, industry analysts anticipate broader adoption across diverse construction applications, from infrastructure megaprojects to residential development. The trajectory points toward construction sites where fleets of autonomous machines work in coordinated patterns, managed by smaller crews of supervisors and technicians who oversee operations remotely, fundamentally reshaping the labor model and safety profile of heavy construction work.
Related Organizations

Built Robotics
United States · Startup
Creates the Exosystem, an aftermarket kit that transforms heavy construction equipment like excavators into autonomous robots.

World's leading manufacturer of construction and mining equipment.

Industrial giant using thermoelectric generators via its subsidiary KELK to harvest waste heat in steel and manufacturing plants.

Provides autonomous vehicle software for mining and construction equipment.

Builds a plug-and-play autonomy stack and simulation tools specifically for heavy industrial vehicles.

Turns construction equipment into semi-autonomous robots controlled remotely.

Major international builder of heavy equipment.

Developer of the 'Honda Mobile Power Pack', a standardized swappable battery for motorcycles and small mobility devices.

An autonomous driving startup focused on off-road and industrial environments, offering a simplified autonomy stack for haul trucks.

A designer and manufacturer of precision control components and systems, including haptic simulators for medical and dental training.