Deep-Sea Mining Robotics
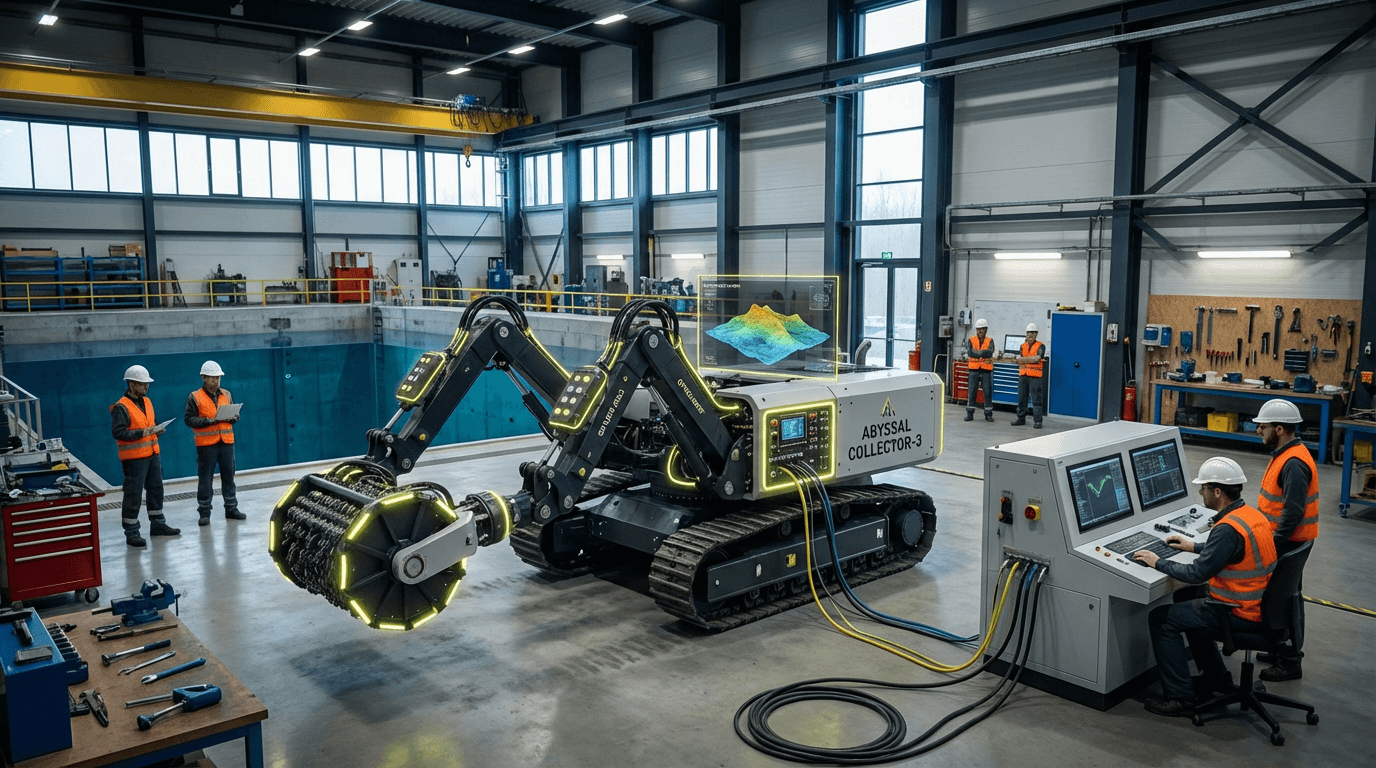
Deep-sea mining robotics represent a convergence of advanced underwater engineering, autonomous systems, and materials handling technologies designed to extract mineral resources from the ocean floor at depths previously inaccessible to industrial operations. These systems typically comprise three integrated components: seafloor collection units that traverse the seabed to gather polymetallic nodules or excavate massive sulfide deposits, vertical transport mechanisms such as riser and lifting systems that convey ore slurry from depths of 1,000 to 6,000 meters to surface vessels, and sophisticated remotely operated vehicles (ROVs) or autonomous underwater vehicles (AUVs) that provide monitoring, maintenance, and precision control. The robotics must withstand extreme pressures exceeding 600 atmospheres, operate in near-freezing temperatures and complete darkness, and navigate complex terrain while minimizing sediment disturbance. Advanced sensor arrays, real-time telemetry systems, and machine learning algorithms enable these platforms to identify high-grade deposits, optimize collection patterns, and adapt to unpredictable seafloor conditions with minimal human intervention.
The extractives industry faces mounting pressure to secure critical minerals—particularly cobalt, nickel, copper, and rare earth elements—essential for renewable energy technologies, electric vehicle batteries, and advanced electronics, yet terrestrial deposits are increasingly concentrated in geopolitically sensitive regions and subject to declining ore grades. Deep-sea mining robotics address this supply challenge by accessing vast untapped reserves on the abyssal plains, where polymetallic nodules containing battery-grade metals have accumulated over millions of years. Early pilot programs suggest that a single mining operation could potentially yield quantities of critical minerals comparable to multiple land-based mines, with proponents noting reduced surface footprint, no deforestation, and no displacement of communities. However, the technology also confronts significant environmental concerns, as seafloor ecosystems remain poorly understood and potentially vulnerable to disruption from sediment plumes, noise pollution, and habitat destruction. This tension between resource security and ocean stewardship has prompted calls for comprehensive environmental impact assessments and international regulatory frameworks before commercial-scale deployment proceeds.
Current development of deep-sea mining robotics remains largely in the pilot and demonstration phase, with several international consortia conducting test operations in the Clarion-Clipperton Zone of the Pacific Ocean under exploration licenses from the International Seabed Authority. These trials have validated the technical feasibility of robotic collection systems while highlighting the need for improved environmental monitoring capabilities and more precise control over sediment dispersal. Industry analysts note that commercial viability depends not only on technological maturation but also on evolving regulatory frameworks, metal price dynamics, and public acceptance of ocean resource extraction. As global demand for battery metals intensifies and terrestrial mining faces increasing constraints, deep-sea robotics may transition from experimental technology to operational reality within the next decade, fundamentally reshaping the geography of mineral supply chains and raising profound questions about humanity's relationship with the least-explored frontier on Earth.
Related Organizations

A deep-sea minerals exploration company focused on the collection of polymetallic nodules using robotic collector vehicles.

The deep-sea exploratory division of the DEME Group, actively testing the 'Patania' series of nodule collector robots.

A startup developing autonomous underwater vehicles (AUVs) that use computer vision and selective harvesting arms to pick up nodules without dredging the seafloor.

A global leader in subsea engineering and the design of remote intervention equipment, including massive seafloor mining vehicles.

A world-leading offshore contractor that has partnered with The Metals Company to engineer the riser systems and deploy the collector vehicles.

Japan Agency for Marine-Earth Science and Technology, which conducts extensive research into deep-sea mineral deposits and robotic technologies for extraction.

A construction machinery giant that has adapted its trench cutter technology for deep-sea sampling and mining applications.
The French National Institute for Ocean Science, which develops underwater vehicles and studies the impacts of deep-sea mining.

A Norwegian company developing proprietary marine mineral exploration and extraction technologies, focusing on crusts and sulphides.

Delivers 'Vessel Insight' and digital twin technologies that capture sensor data from ships to monitor fuel consumption and emissions.





