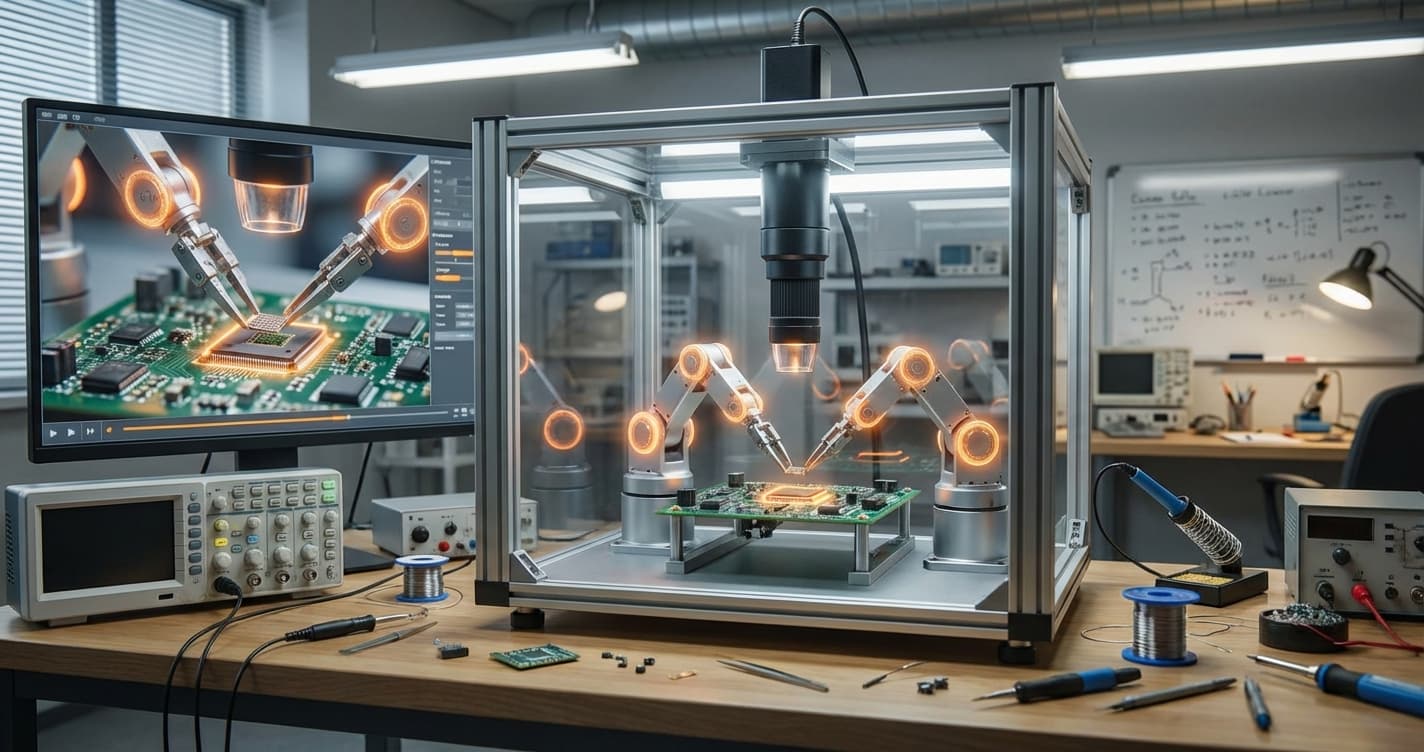
Micro and Miniature Robots
Micro and miniature robots represent a paradigm shift in manufacturing and inspection, operating at scales ranging from sub-millimeter to a few centimeters where traditional robotic systems cannot function effectively. These diminutive machines are fabricated using advanced techniques including microelectromechanical systems (MEMS) processes, origami-inspired folding methods, and soft robotics principles. Their actuation mechanisms vary widely, from magnetic field manipulation and piezoelectric drives to chemical propulsion and light-activated materials. At these scales, surface forces dominate over gravitational effects, requiring entirely different design principles compared to conventional robotics. The robots can navigate confined spaces, manipulate microscale components with precision measured in micrometers, and operate in environments ranging from dry cleanrooms to fluid-filled channels. Some designs incorporate onboard sensors and simple control circuits, while others rely on external field guidance for coordinated movement.
The manufacturing industry faces persistent challenges in assembling and inspecting products at the microscale, where human dexterity and traditional automation both fall short. Micro-robots address critical bottlenecks in producing next-generation electronics, where component miniaturization continues to outpace assembly capabilities. They enable quality control processes that were previously impossible, such as internal inspection of sealed microfluidic chips used in medical diagnostics or examination of micro-optical assemblies without disassembly. In precision instrument manufacturing, these robots can perform repairs and adjustments within assembled devices, eliminating costly teardown and reassembly cycles. The technology also enables swarm-based approaches to manufacturing, where hundreds or thousands of coordinated micro-robots work in parallel to dramatically accelerate production of microscale structures. This capability is particularly valuable for photonics manufacturing, where precise alignment of optical components at micrometer tolerances determines device performance.
Research institutions and specialized manufacturers have demonstrated functional prototypes across multiple application domains, with early commercial deployments emerging in semiconductor inspection and biomedical device production. Current implementations include magnetic micro-robots that navigate through microfluidic channels to detect manufacturing defects, origami-inspired robots that self-assemble and then perform precision tasks in confined spaces, and swarms of coordinated robots that construct three-dimensional microstructures through collective behavior. Industry analysts note growing interest from electronics manufacturers seeking solutions for assembling components below one millimeter, where pick-and-place automation becomes impractical. The technology aligns with broader trends toward miniaturization in consumer electronics, implantable medical devices, and lab-on-chip diagnostics. As fabrication techniques mature and control systems become more sophisticated, micro and miniature robots are positioned to unlock manufacturing capabilities at scales that bridge the gap between conventional automation and molecular-scale processes, potentially enabling entirely new categories of microscale products.
Related Organizations

Developing micro-reactors for nuclear thermal and nuclear electric propulsion in space.

Developed the SWIFT (Sacrificial Writing into Functional Tissue) method for 3D printing vascular channels in living matrices.

Non-profit research institute with a long history in AI, currently working on hybrid neuro-symbolic systems for DARPA and commercial use.

Conducts advanced research in bioelectronics and the interface between biological systems and electronic circuits.

A leading research institute investigating the principles of perception, action, and learning in autonomous systems.

Specializes in micro-assembly robotics and grippers capable of handling components smaller than 10 microns.
Focuses on atomically precise manufacturing, a prerequisite for constructing theoretical reversible mechanical computing systems.
Leader in micro-scale 3D printing (Projection Micro Stereolithography) used to fabricate the chassis and components of micro-robots.

Global leader in piezo positioning systems and hexapods used for micro-robotics motion control and assembly.