Soft Robotics Actuators
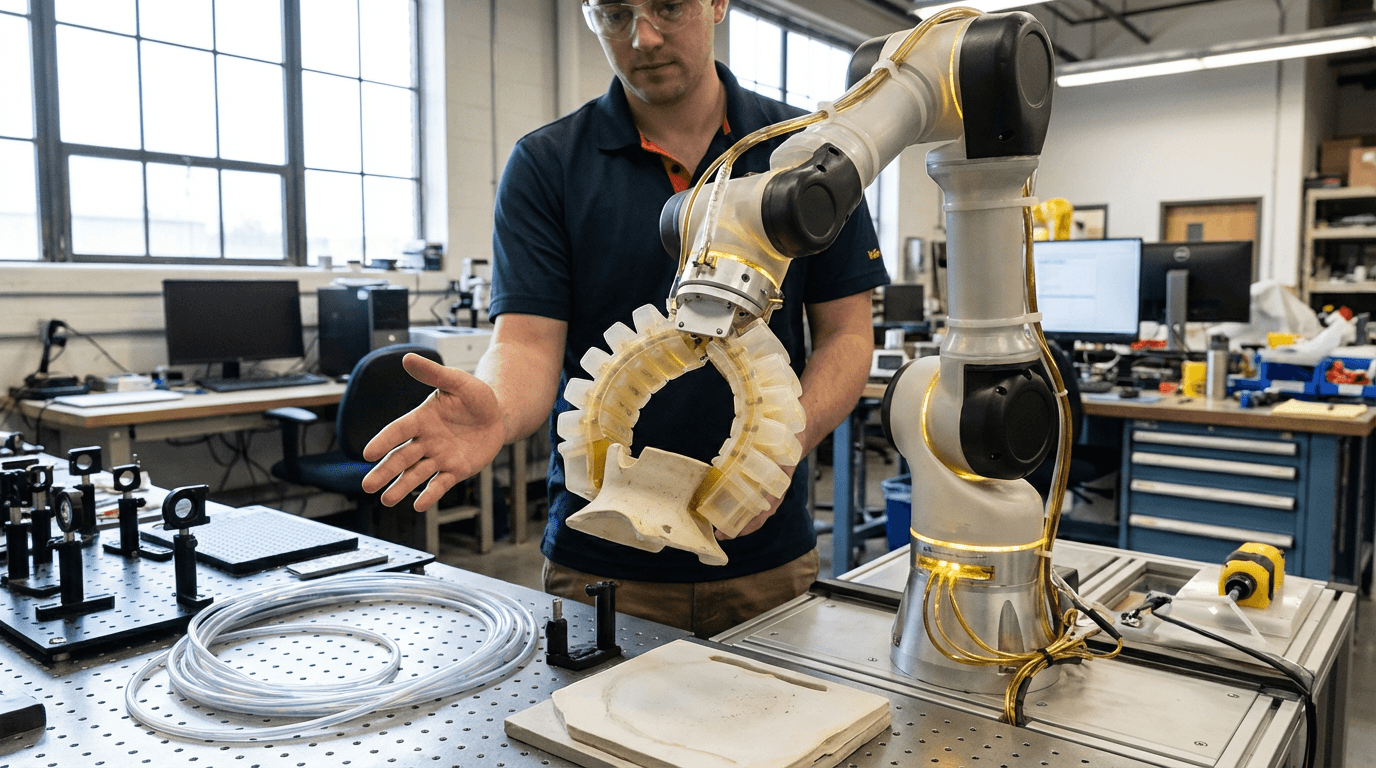
Soft robotics actuators represent a fundamental departure from traditional rigid robotic systems, employing compliant materials such as silicone elastomers, shape-memory alloys, and pneumatic networks to create mechanical components that can bend, stretch, and conform to their surroundings. Unlike conventional actuators built from metal and hard plastics, these flexible systems derive their motion from the controlled deformation of soft materials, often powered by pneumatic pressure, hydraulic fluids, or electroactive polymers. The key technical principle involves designing structures that can undergo large-scale, reversible deformations while maintaining precise control over their movement and force output. This is typically achieved through carefully engineered internal chambers or fiber-reinforced architectures that direct expansion and contraction in specific directions, enabling complex motions like grasping, bending, and twisting without the need for traditional joints or rigid linkages.
The industrial landscape has long struggled with the challenge of creating collaborative workspaces where humans and machines can work side by side without safety barriers or constant risk of injury. Traditional industrial robots, with their rigid structures and high-speed movements, pose significant hazards in shared environments and lack the adaptability needed for handling delicate or irregularly shaped objects. Soft robotics actuators address these limitations by providing inherent compliance that makes physical contact safe, eliminating the need for complex force-sensing systems and emergency stop mechanisms. This technology enables new manufacturing paradigms where robots can handle fragile components like electronics or food products, work in confined spaces that would damage rigid systems, and adapt to variations in part geometry without extensive reprogramming. The ability to create grippers and manipulators that naturally conform to object shapes also reduces the need for custom tooling, lowering costs and increasing flexibility in production lines.
Current deployments of soft robotics actuators are expanding beyond research laboratories into commercial applications, particularly in sectors requiring gentle handling and human proximity. Food processing facilities are adopting soft grippers for tasks like picking delicate produce or packaging baked goods, while electronics manufacturers use them for handling components that would be damaged by traditional rigid grippers. The automotive industry is exploring soft actuators for collaborative assembly tasks where workers and robots share workspace, and logistics companies are testing them for warehouse automation involving irregular packages. Research suggests that the global market for soft robotics is experiencing significant growth as manufacturing shifts toward more flexible, human-centered production models. Looking forward, advances in materials science and control algorithms are expected to enhance the strength, speed, and precision of soft actuators, potentially enabling their use in more demanding industrial applications while maintaining their inherent safety advantages. This technology aligns with broader Industry 4.0 trends toward adaptive manufacturing systems that can seamlessly integrate human expertise with robotic efficiency.
Related Organizations

Industrial automation company known for its Bionic Learning Network, creating pneumatic artificial muscles and soft-robotic animals.
A premier bio-inspired engineering lab developing soft robotics and adaptive materials.

Develops soft compliant grippers for industrial food handling and logistics.

Home to the BioRobotics Institute, a leading European center for soft robotics research.

Chinese company specializing in soft robotic grippers and intelligent manufacturing solutions.

Manufacturer of end-of-arm tooling for collaborative applications, including the HEX 6-axis force/torque sensors.

A Chinese manufacturer specializing in soft robotic grippers for the food, 3C, and auto parts industries.

A VR/AR hardware subsidiary of ByteDance producing the Pico 4 Enterprise with color passthrough capabilities.

Global tire manufacturer developing 'Bridgestone Mobility Solutions' and Webfleet for connected tire management.