Neuromorphic Tactile Sensors
Neuromorphic tactile sensors represent a paradigm shift in robotic perception, drawing inspiration from biological nervous systems to enable machines to process touch information in fundamentally new ways. Unlike conventional tactile sensors that continuously sample pressure or force data at fixed intervals, neuromorphic sensors operate on an event-driven basis, generating electrical spikes only when meaningful changes in contact occur—much like how human mechanoreceptors fire action potentials in response to skin deformation. This approach leverages specialized transduction mechanisms that convert mechanical stimuli such as pressure gradients, vibrations, and surface textures into asynchronous spike trains. The sensors typically incorporate arrays of sensing elements paired with neuromorphic circuits that process information locally, mimicking the distributed intelligence found in biological skin. This architecture enables extremely low latency responses and dramatically reduced data bandwidth compared to traditional digital sensors, as information is encoded in the timing and frequency of spikes rather than continuous data streams.
The manufacturing and automation sectors face persistent challenges in handling delicate, irregular, or previously unseen objects—tasks that remain trivial for humans but extraordinarily difficult for robots. Traditional robotic grippers struggle with force control and often lack the sensory feedback necessary to detect critical events like incipient slippage before an object drops. Neuromorphic tactile sensors address these limitations by providing robots with texture discrimination capabilities and real-time slip detection, enabling adaptive grip adjustments within milliseconds. This technology overcomes the computational bottleneck that plagues conventional vision-based or force-feedback systems, where processing delays can result in dropped objects or damaged goods. The event-based nature of these sensors means that robots can react to tactile events as quickly as they occur, without waiting for the next sampling cycle. This capability is particularly transformative for industries requiring gentle manipulation of fragile items, variable-force assembly tasks, or operations in unstructured environments where objects cannot be precisely positioned in advance.
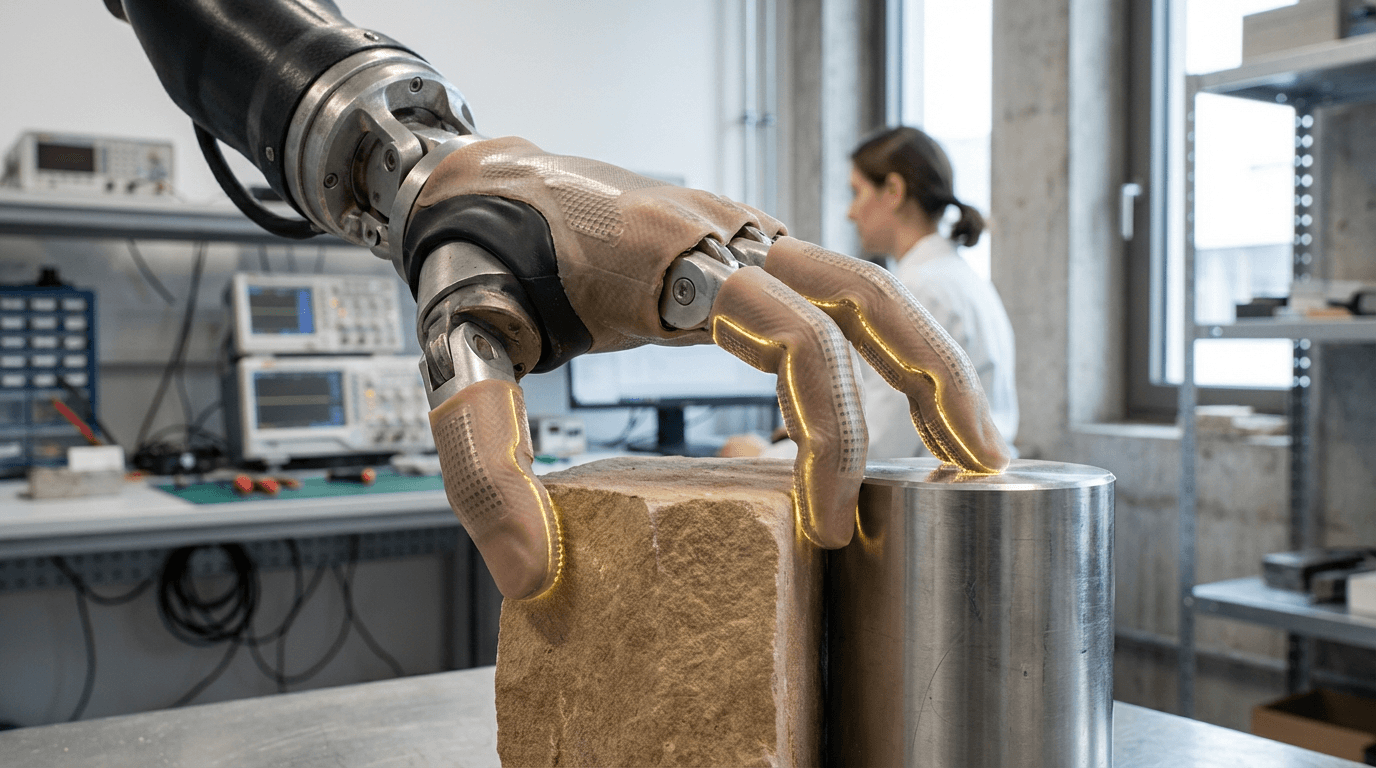
Research prototypes and early commercial systems have demonstrated the practical viability of neuromorphic tactile sensing in laboratory settings and controlled industrial trials. Robotic hands equipped with these sensors have successfully manipulated objects ranging from delicate berries to flexible cables, adjusting grip force in response to detected slip events with response times approaching those of human reflexes. The technology shows particular promise in collaborative robotics, where machines work alongside humans and must handle unpredictable contact scenarios safely. Industry analysts note growing interest from sectors including food processing, electronics assembly, and warehouse automation, where the combination of gentle handling and rapid response could unlock new automation opportunities. As neuromorphic computing architectures mature and manufacturing costs decline, these sensors are expected to become integral components of next-generation robotic systems, contributing to the broader trend toward more adaptive, responsive industrial automation that can handle the complexity and variability of real-world manipulation tasks.
Related Organizations

Singapore's flagship university.

Produces uSkin, a high-density tactile sensor skin for robots that is soft, durable, and capable of 3-axis force sensing.

Develops tactile sensors that give robots the sense of touch and the ability to measure friction and slip.

Develops silicon spin qubits using advanced 300mm wafer manufacturing processes.

Builders of the Shadow Dexterous Hand, a modular end-effector used for advanced manipulation research.

Develops smart fabric sensors originally designed for musical instruments, now used in VR and safety.

Pioneer in event-based vision sensors and associated neuromorphic processing algorithms.

Develops tactile intelligence technology using elastomeric sensors to give robots the sense of touch.