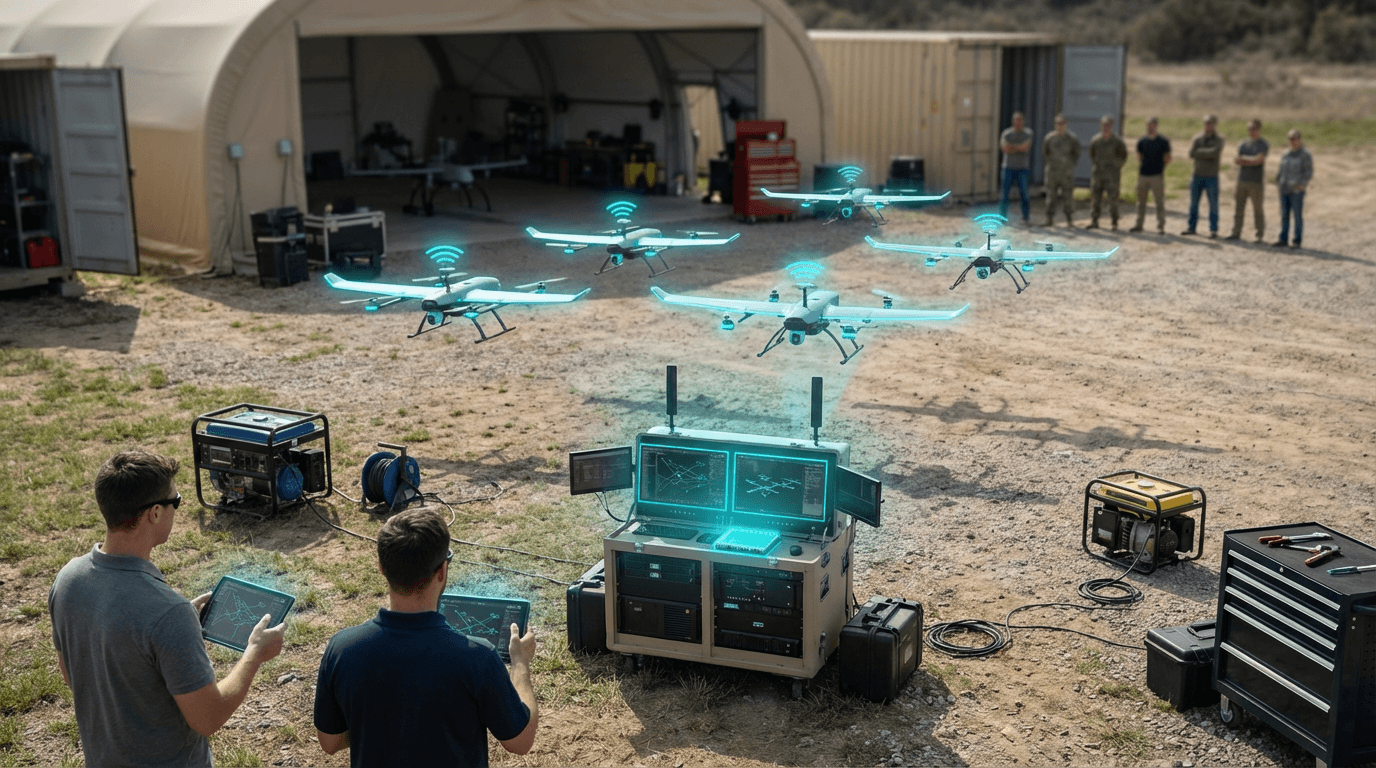
Swarm Coordination Algorithms for Multi-Drone Operations
Swarm coordination algorithms represent a fundamental shift from traditional centralized flight control systems to distributed intelligence models inspired by natural phenomena like bird flocking and insect colonies. Rather than relying on a single command center to direct each aircraft individually, these algorithms enable autonomous drones to make local decisions based on information from nearby units, creating emergent collective behaviors from simple individual rules. The technical foundation involves consensus protocols that allow drones to agree on shared objectives, collision avoidance mechanisms that maintain safe separation distances, and task allocation strategies that dynamically distribute workloads across the fleet. Advanced implementations incorporate machine learning techniques that allow swarms to adapt their coordination patterns in real-time, adjusting formation density, communication topology, and flight paths based on environmental conditions, mission requirements, and system failures. The mathematical frameworks underlying these systems draw from control theory, graph theory, and multi-agent optimization, enabling hundreds or thousands of aircraft to operate cohesively without overwhelming communication bandwidth or computational resources.
The aviation industry faces mounting pressure to scale drone operations beyond isolated single-aircraft missions to address complex logistical and operational challenges. Traditional air traffic management systems, designed for relatively sparse manned aircraft traffic, cannot accommodate the density and dynamism of large-scale drone deployments. Swarm coordination algorithms solve this scalability problem by eliminating bottlenecks inherent in centralized control architectures, where a single failure point or communication delay can compromise entire operations. For cargo delivery networks, this technology enables simultaneous package transport across urban areas without requiring dedicated air corridors or extensive ground-based infrastructure. In agricultural applications, coordinated drone fleets can survey vast crop areas with unprecedented efficiency, dynamically adjusting coverage patterns to focus on areas showing signs of stress or disease. Emergency response scenarios particularly benefit from swarm resilience characteristics—when individual units fail or lose communication, the remaining drones automatically reconfigure to maintain mission effectiveness, a critical capability when operating in disaster zones with degraded infrastructure.
Early commercial deployments have demonstrated the viability of coordinated multi-drone systems in controlled environments, with logistics companies testing warehouse-to-customer delivery networks using small swarms of autonomous aircraft. Agricultural technology firms have deployed coordinated fleets for precision spraying and monitoring operations, where dozens of drones work in concert to cover large fields while avoiding redundant coverage and minimizing chemical usage. Research institutions and defense organizations continue advancing the fundamental algorithms, with recent field demonstrations showcasing swarms of over one hundred drones executing complex maneuvers and adapting to simulated equipment failures. However, widespread adoption faces significant regulatory hurdles, as aviation authorities worldwide grapple with establishing safety standards and airspace integration frameworks for dense autonomous operations. The technology's trajectory points toward increasingly sophisticated coordination capabilities, including heterogeneous swarms mixing different aircraft types and sizes, integration with urban air mobility networks, and autonomous negotiation with manned aircraft traffic. As computational capabilities advance and regulatory frameworks mature, swarm coordination algorithms are positioned to become essential infrastructure for the next generation of aviation operations, enabling aerial logistics networks and sensing capabilities that would be economically and operationally impossible with traditional single-aircraft approaches.
Related Organizations

Runs the Semantic Forensics (SemaFor) program to develop technologies for automatically detecting, attributing, and characterizing falsified media.
Defense technology company building Hivemind, an AI pilot for autonomous drone swarms and aircraft operating without GPS or comms.
Develops Lattice OS, an AI-powered operating system that fuses sensor data to automate command and control across autonomous systems.
Icarus Swarms
France · Startup
French company providing micro-drone swarm kits for security and defense forces.

US drone manufacturer specializing in autonomous flight and 3D scan software.

Defense engineering company focusing on space superiority and directed energy.

Swiss Federal Institute of Technology, a global leader in privacy technologies and decentralized AI research.
Provides 'Mission Control' software for managing autonomous drone fleets.

Major defense contractor developing Reciprocal Quantum Logic (RQL) for cryogenic computing.

Provides an open-source based operating system for drones that supports fleet management and multi-vehicle coordination.