Soft-Robotic Musculature
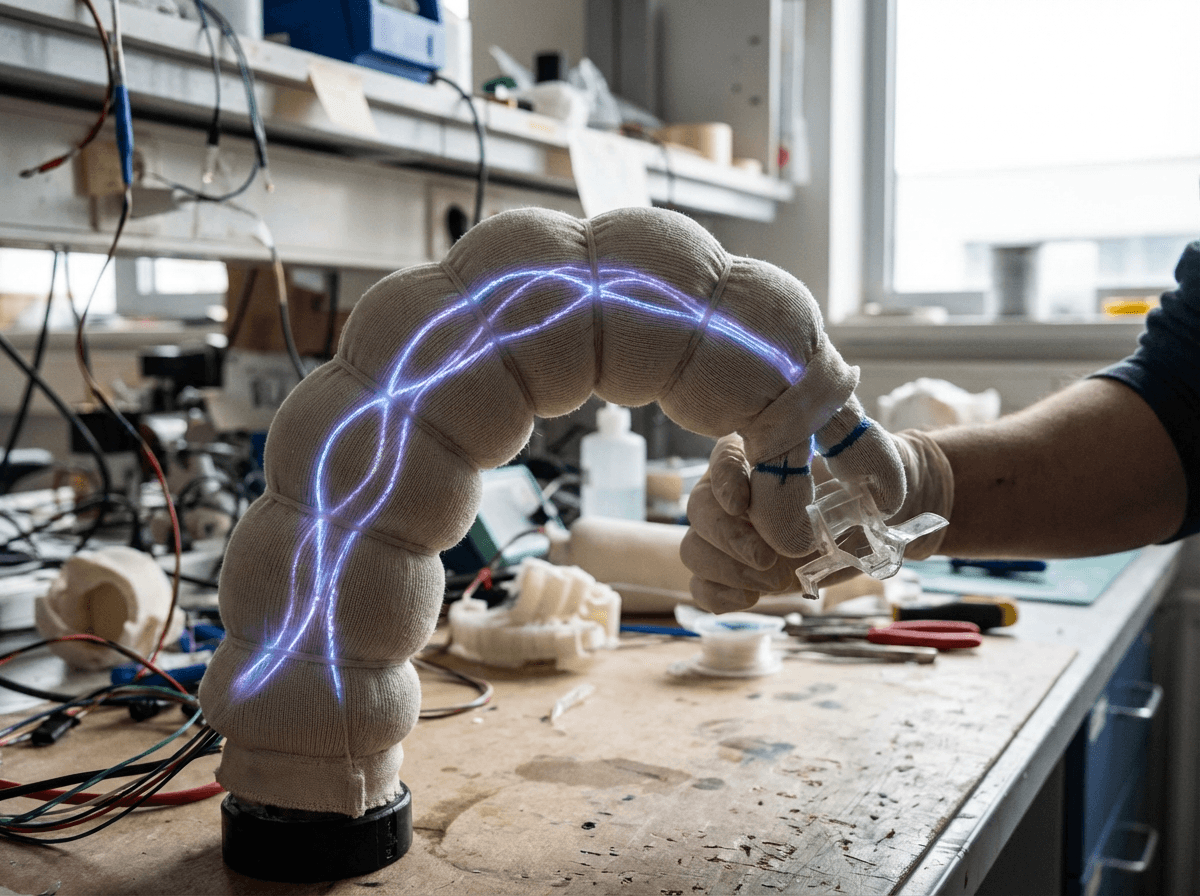
Soft-robotic musculature uses distributed networks of small actuators embedded throughout flexible, compliant structures to create motion that mimics biological muscle. These systems can use various actuation principles including pneumatic, hydraulic, shape-memory alloys, or electroactive polymers, creating smooth, fluid motion rather than the rigid, jerky movements of traditional motors and joints.
This innovation addresses the safety and interaction challenges of traditional rigid robots, which can be dangerous in close proximity to humans and struggle with delicate manipulation tasks. Soft robotic systems are inherently safer due to their compliance and can interact more naturally with humans and delicate objects. The technology enables new applications in healthcare, human-robot collaboration, and applications requiring gentle, dexterous manipulation. Research institutions and companies are developing these technologies, with some applications already in use for medical devices and assistive robotics.
The technology is particularly significant for applications requiring safe human interaction, such as healthcare, elder care, and collaborative manufacturing. As robots become more integrated into human environments, soft robotics offers a pathway to creating systems that can work safely alongside people. However, the technology faces challenges including control complexity, power efficiency, and durability, which must be addressed for widespread adoption.
Related Organizations
United States · Startup
Commercializes HASEL (Hydraulically Amplified Self-healing Electrostatic) actuator technology for soft motion.

Developing biomimetic androids with hydraulic artificial muscles that mimic human anatomy and strength.

A premier research center for biologically inspired engineering, known for soft exosuits and microrobotics.

Industrial automation company known for its Bionic Learning Network, creating pneumatic artificial muscles and soft-robotic animals.

A leading research institute investigating the principles of perception, action, and learning in autonomous systems.
Suzumori Endo Lab (Tokyo Tech)
Japan · University
Academic lab famous for developing multifilament artificial muscles and soft robotic mechanisms.

Major UK research center with a dedicated Soft Robotics group exploring biodegradable actuators and artificial muscles.

Develops soft compliant grippers for industrial food handling and logistics.

Non-profit research institute with a long history in AI, currently working on hybrid neuro-symbolic systems for DARPA and commercial use.

Investigates soft robotics for safe human-robot interaction and expressive animatronics.
Supporting Evidence
Research this in Signals
Signals turns a topic into a sourced research record you can inspect and rerun. Your first scan is free, and this one starts with Soft-Robotic Musculature already loaded, so edit it or scan as is.