Autonomous Infrastructure Maintenance
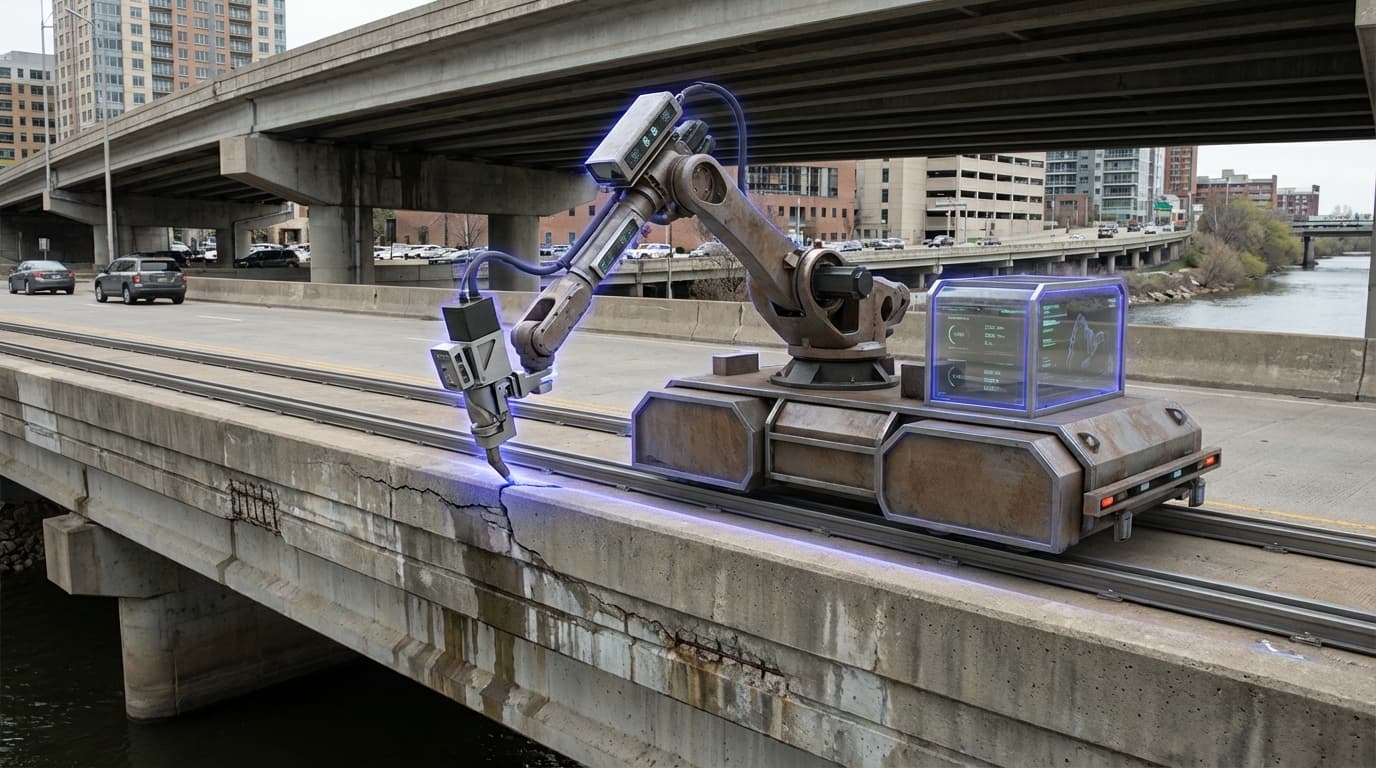
Urban infrastructure deterioration represents one of the most pressing challenges facing modern cities, with aging roads, bridges, water systems, and public facilities requiring constant attention and significant financial resources. Traditional maintenance approaches rely heavily on scheduled inspections and reactive repairs, often addressing problems only after they become severe enough to cause service disruptions or safety hazards. This reactive model leads to inefficient resource allocation, unexpected failures, and costly emergency interventions that strain municipal budgets. Autonomous infrastructure maintenance emerges as a transformative solution to this challenge, deploying fleets of robotic systems equipped with advanced sensors, computer vision capabilities, and specialized repair tools to continuously monitor and maintain public assets. These systems operate around the clock, identifying structural weaknesses, surface degradation, and potential failures before they escalate into major problems. The technology encompasses various specialized platforms, from ground-based robots that navigate roadways detecting and filling potholes with precision materials, to aerial drones that inspect bridge structures and utility poles, to underground crawlers that assess and repair water and sewer lines from within.
The shift from scheduled to continuous maintenance fundamentally transforms how cities manage their infrastructure portfolios. By detecting issues at their earliest stages—such as minor cracks in pavement or small leaks in water mains—autonomous systems enable interventions when repairs are simplest and least expensive. This preventative approach dramatically reduces the lifecycle costs of infrastructure assets while minimizing the public disruptions typically associated with major repair projects. Research suggests that continuous monitoring can extend infrastructure lifespan by identifying degradation patterns that would otherwise go unnoticed until catastrophic failure occurs. Furthermore, these systems generate comprehensive data about infrastructure conditions, creating digital twins of physical assets that support more informed capital planning and resource allocation decisions. The economic implications are substantial, as municipalities can redirect funds from emergency repairs toward strategic improvements, while reducing the indirect costs of infrastructure failures such as traffic delays, business interruptions, and public safety incidents.
Early deployments of autonomous maintenance systems are already demonstrating practical value in urban environments. Several cities have piloted robotic pothole repair systems that operate during off-peak hours, filling road defects with minimal traffic disruption. Drone-based bridge inspection programs are becoming increasingly common, replacing dangerous and time-consuming manual inspections with rapid, detailed assessments that can be conducted more frequently. Water utilities are exploring autonomous pipe inspection and repair technologies that can address leaks without excavating streets, preserving road surfaces and reducing water loss. As these technologies mature and costs decline, industry analysts note a trajectory toward integrated maintenance ecosystems where multiple autonomous systems coordinate their activities, sharing data and optimizing repair schedules across entire infrastructure networks. This evolution aligns with broader smart city initiatives that leverage artificial intelligence, robotics, and real-time data to create more resilient and efficiently managed urban environments, positioning autonomous infrastructure maintenance as a cornerstone of sustainable urban development in the coming decades.
Related Organizations
University of Liverpool spinoff developing autonomous robots to detect and repair potholes.

Lead institution for the 'Self-Repairing Cities' project, researching drones and robots for infrastructure repair.

Conducts advanced research in bioelectronics and the interface between biological systems and electronic circuits.

Builds wall-climbing robots for industrial inspection of tanks, boilers, and pipes.

A robotics and R&D company serving the energy and utility industries.

Develops TyBOT and IronBOT, autonomous robots for rebar tying and placement in bridge construction and maintenance.

Develops autonomous legged robots (ANYmal) for industrial inspection.

An AI company that uses smartphone data to assess road conditions, now part of Michelin DDi.

US drone manufacturer specializing in autonomous flight and 3D scan software.

Famous for Spot and Atlas, now integrating reinforcement learning for dynamic movement.